عنوان پایان نامه: طراحی و ساخت خلبان خودکار برای ربات پرنده چارپره
ارائهکننده: محمد مهدوی استاد راهنما: دکتر سجاد ازگلی استاد مشاور: دکتر وهاب نکوکار استاد ناظر داخلی اول: دکتر پویا بدری استاد ناظر خارجی اول: دکتر ایمان محمدزمان تاریخ: 1403/11/15 ساعت: 17 مکان: آزمایشگاه 6-36
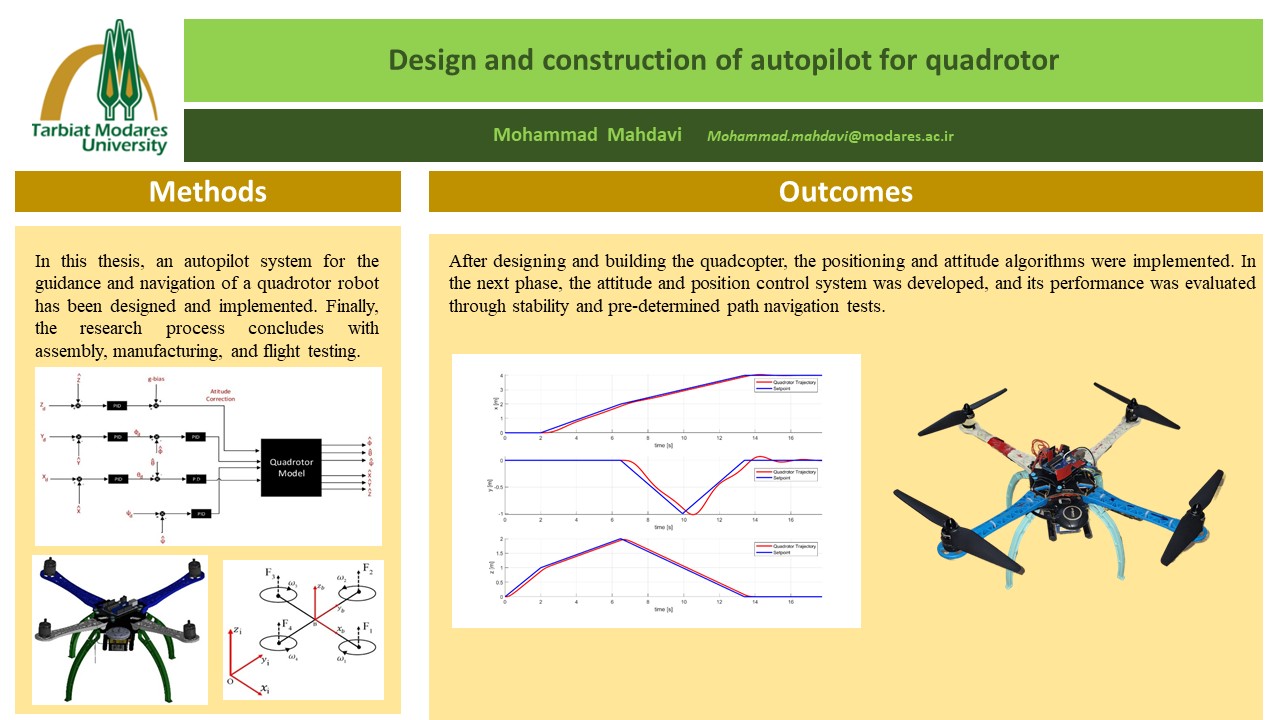
چکیده: رباتهای پرنده به دلیل ویژگیهای منحصربهفرد خود، کاربردهای گستردهای در زمینههایی نظیر صنعت، تحقیقات علمی و خدمات دارند. یکی از پرکاربردترین انواع این رباتها، چارپرهها هستند که به دلیل ساختار ساده و قابلیتهای مانور بالا، توجه بسیاری را به خود جلب کردهاند. طراحی و پیادهسازی سامانهٔ خلبان خودکار، یکی از چالشهای اصلی در توسعهٔ این نوع رباتها است در این پژوهش، سامانة خلبان خودکار برای یک ربات پرندهی چارپره طراحی و پیادهسازی شد. در ابتدا، دینامیک سیستم مدلسازی و معادلات فضای حالت استخراج شد. برای تعیین وضعیت چارپره، از حسگرهای ژیروسکوپ و شتابسنج استفاده شد. دادههای حاصل از این حسگرها با بهرهگیری از فیلتر مکمل پردازش و وضعیت دقیق چارپره تخمین زده شد. همچنین، با ادغام دادههای GPS و شتابسنج و استفاده از فیلتر کالمن، موقعیت ربات بهطور دقیق محاسبه شد سپس، کنترلکنندههای سطح پایین برای حفظ وضعیت و کنترلکنندههای سطح بالا برای برنامهریزی حرکت طراحی و پیادهسازی شدند. نتایج آزمایشها نشان میدهد که روش پیشنهادی میتواند وضعیت و موقعیت چارپره را بادقت و پایداری بالا کنترل کند. دستاوردهای این پژوهش میتواند بهعنوان زیرساختی برای توسعهٔ سامانههای پیشرفتهتر در رباتهای پرنده به کار گرفته شود.